
2026
Rack Cable Management
It's time to get rid of the electrical spaghetti
It's time to get rid of the electrical spaghetti
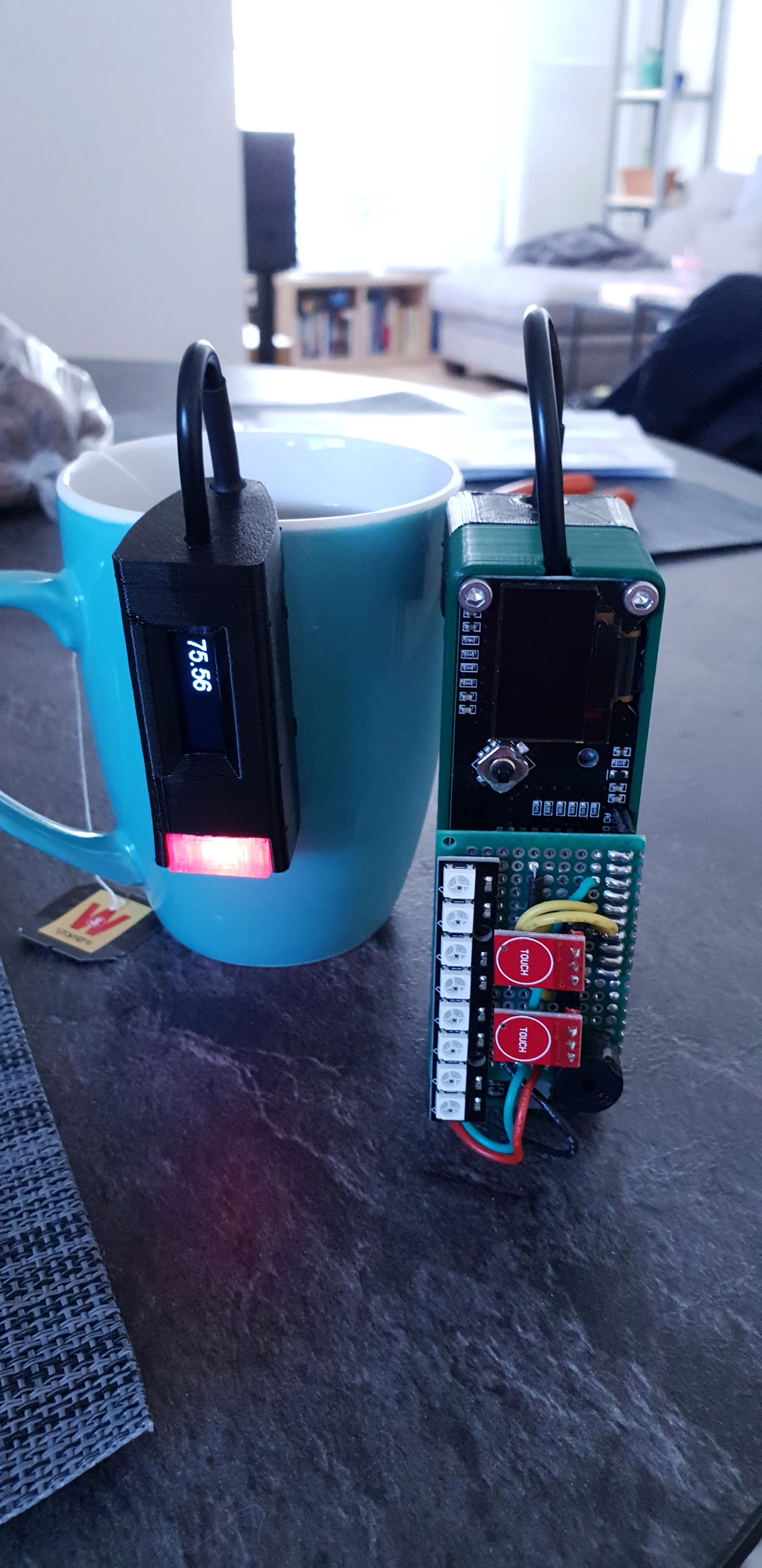
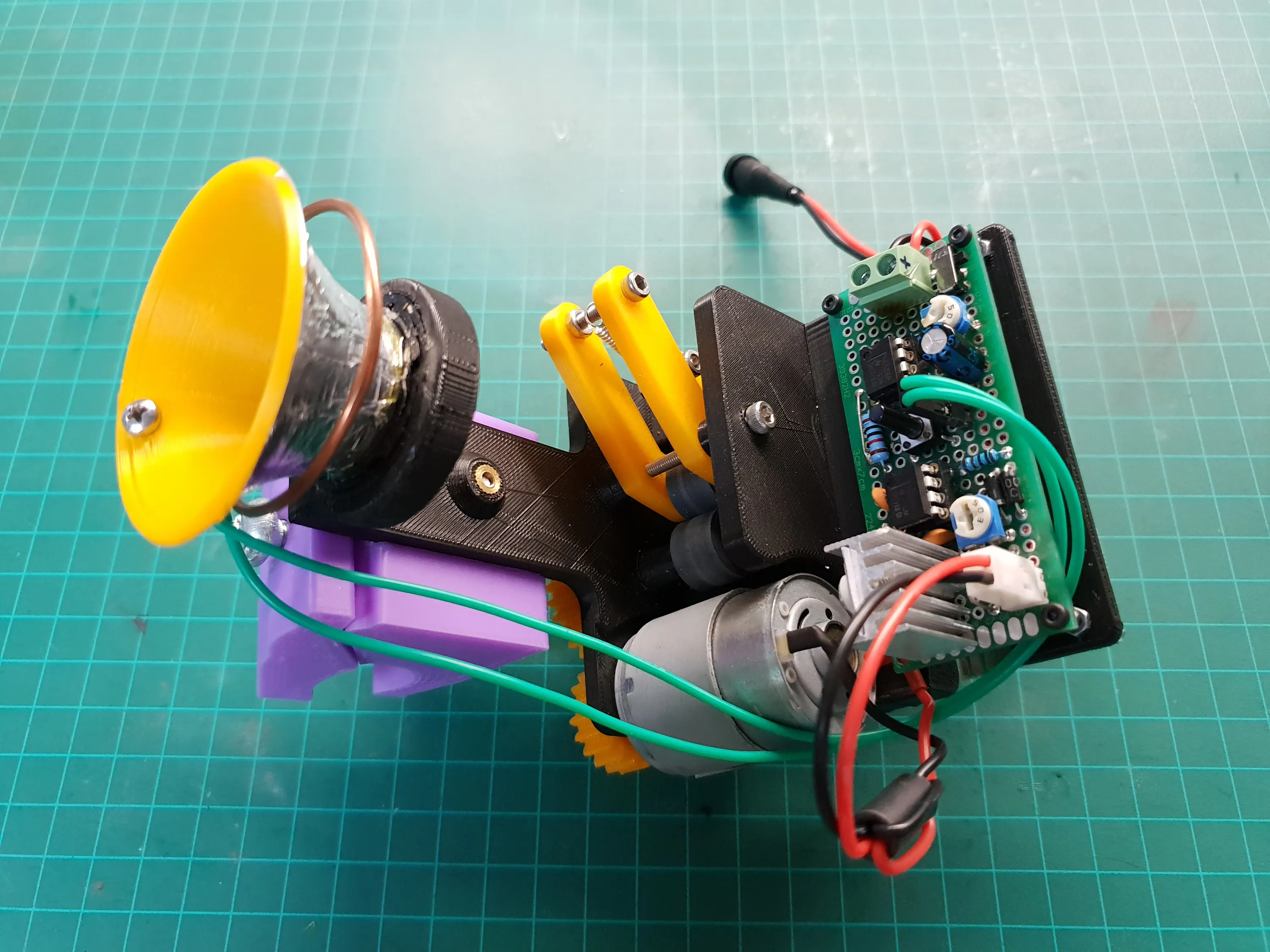
Never drink cold tea again

There's a trend going around now of breast milk jewelry and my wife wanted to buy some.It's pretty expensive for what it is - a resin cast blob, mixed with p...
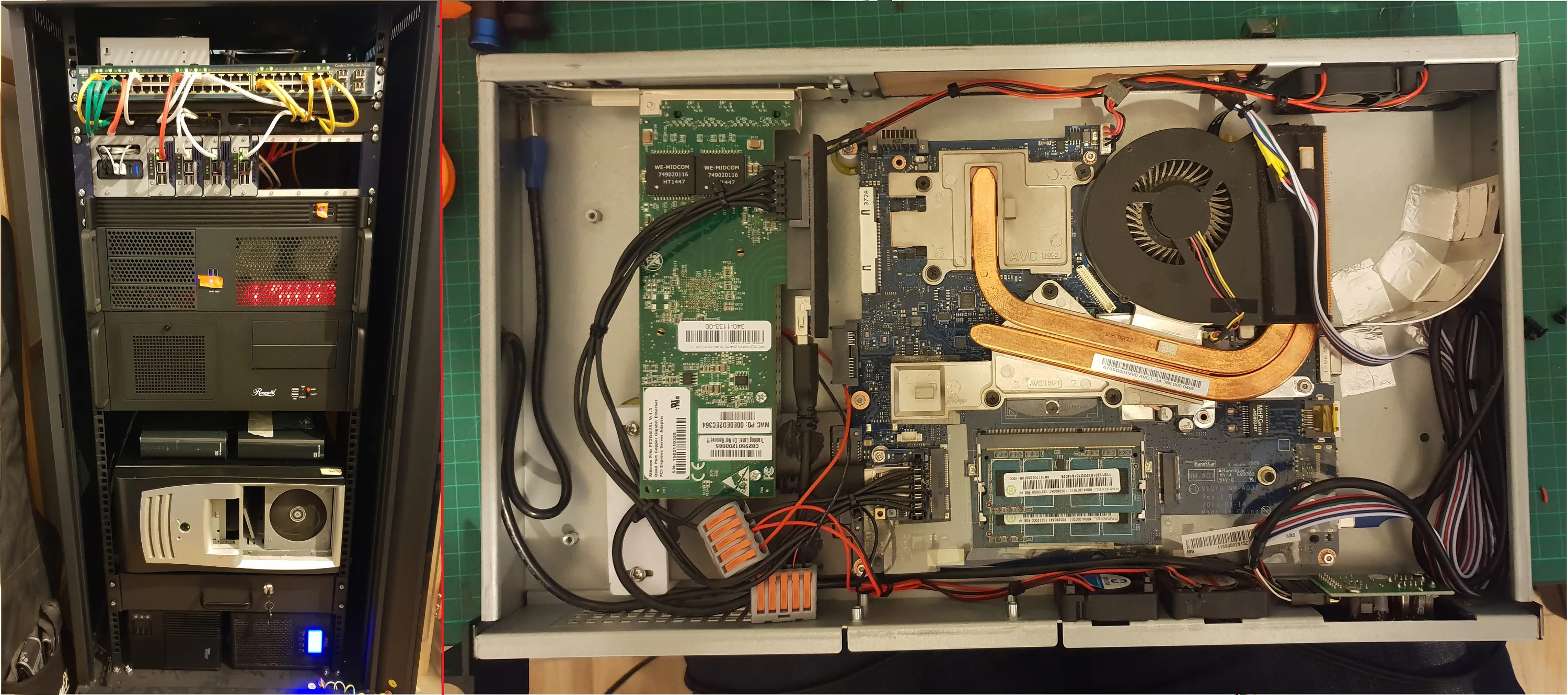
As part of my network upgrades, I wanted a better router and firewall. In the past, I've played around with several router and firewall operating systems in ...
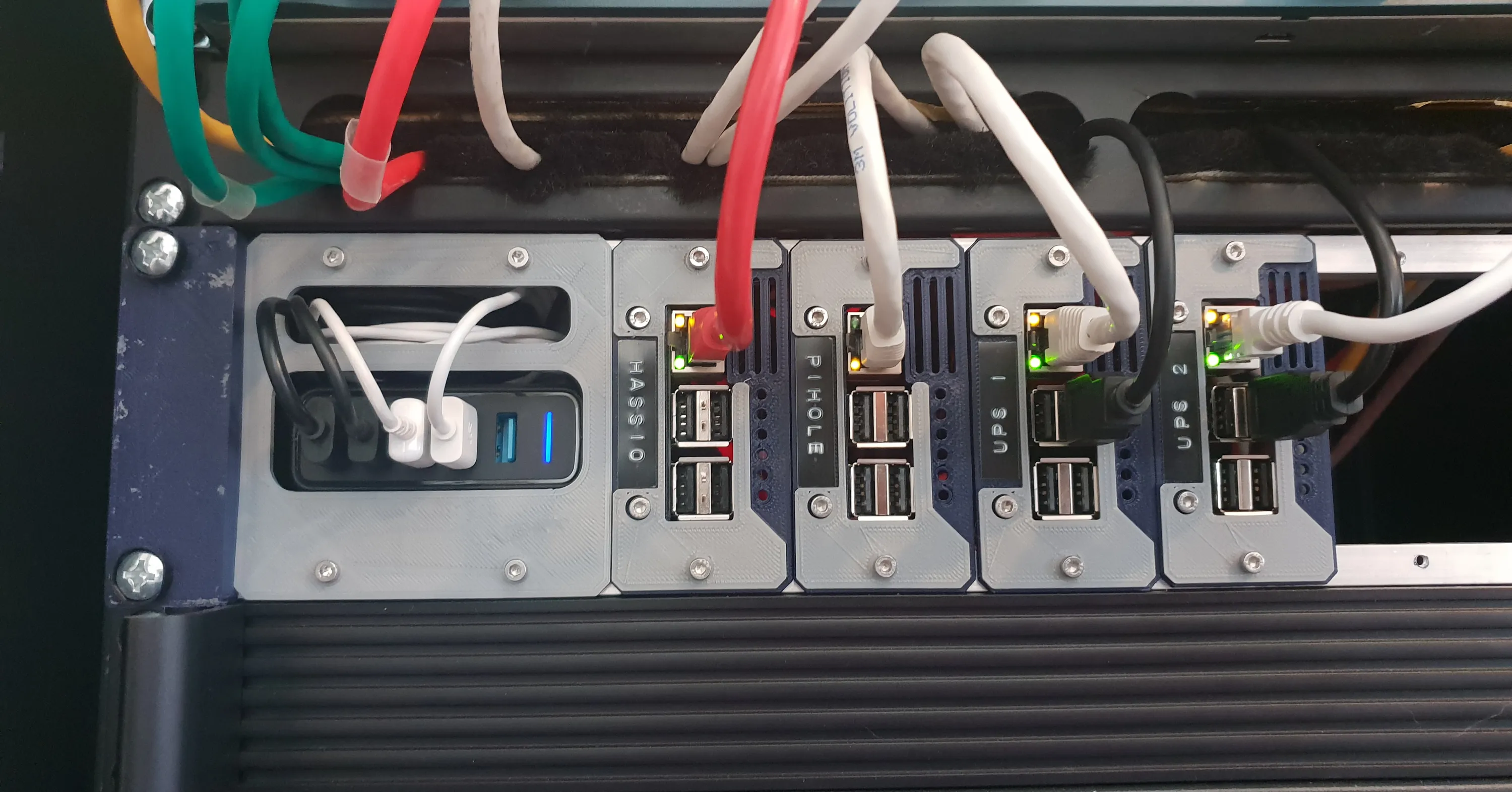
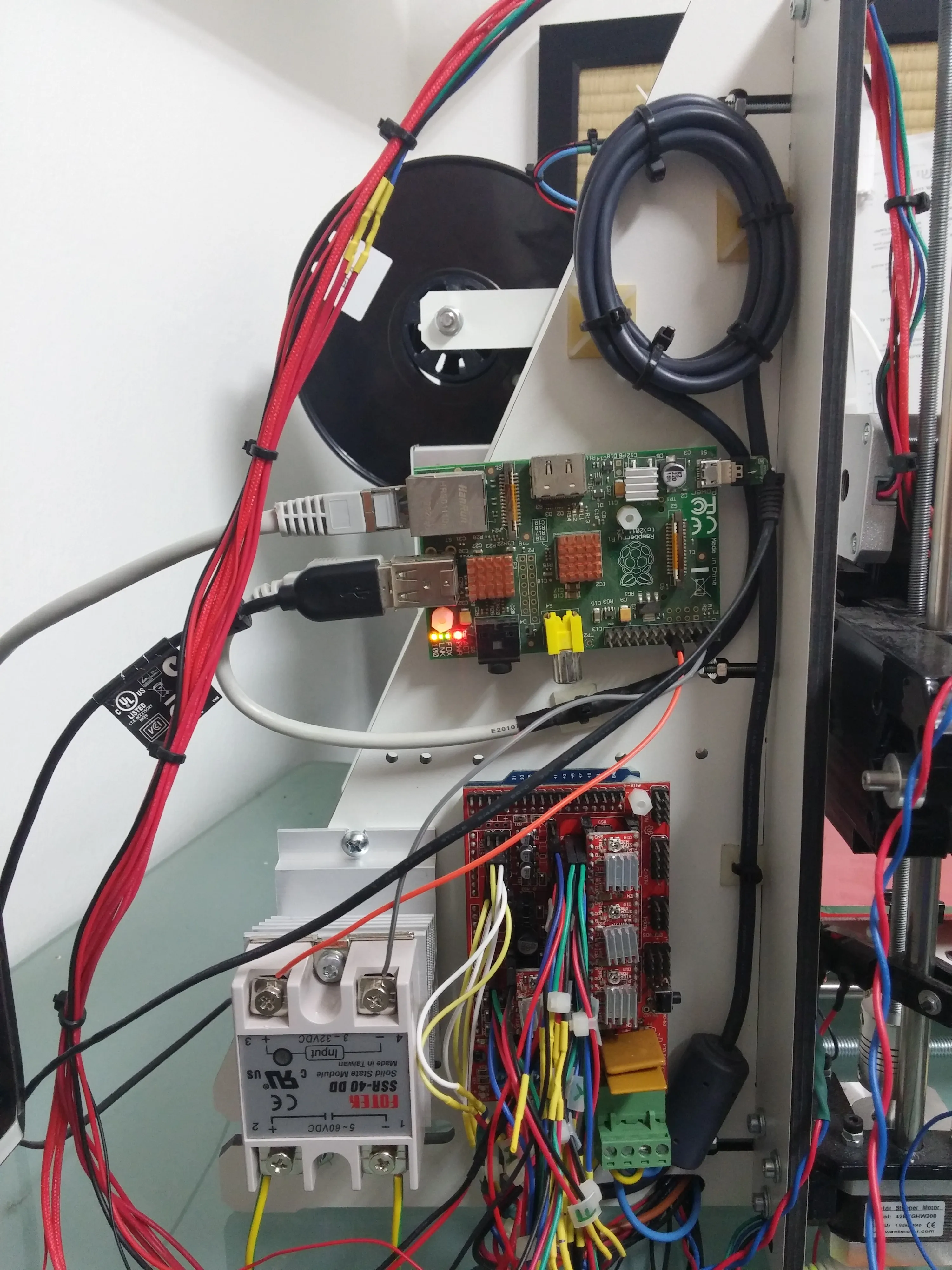
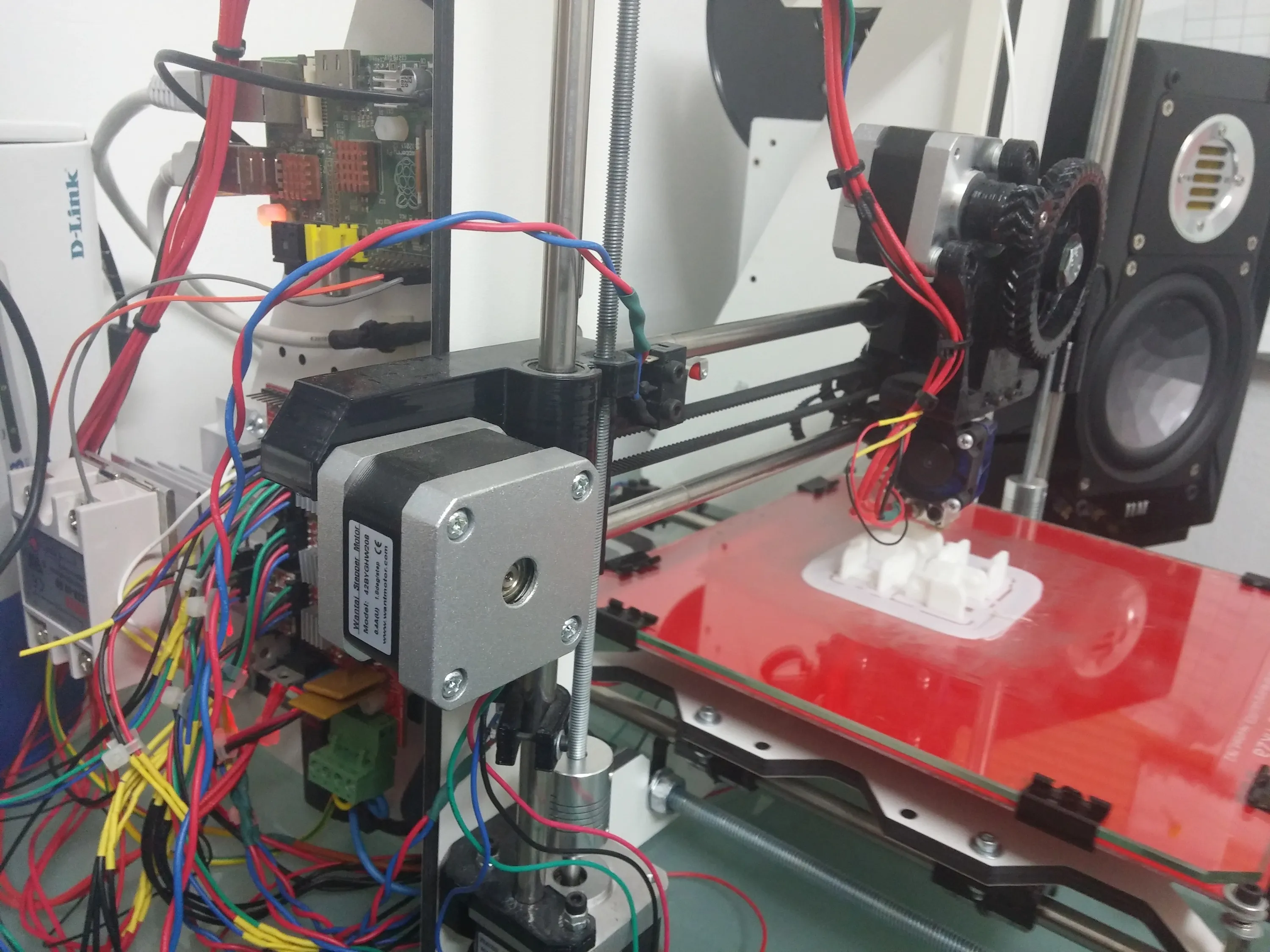
I have a few Raspberry Pis running services in my network. Some of them have to be physically connected to other things, like 3D printers, UPSs or sensors, s...

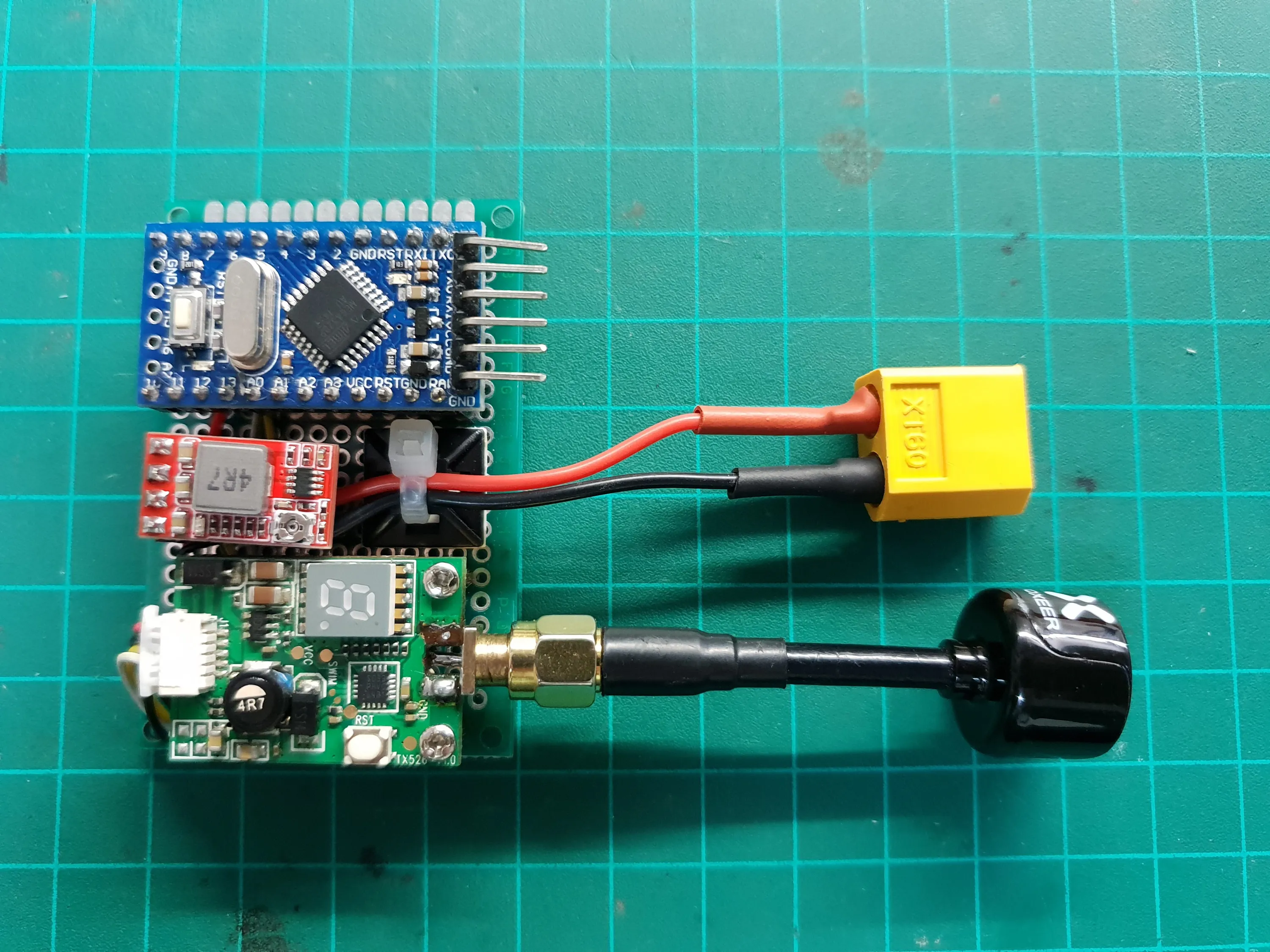
I got a box of old and defective VTX's. Let's see if anything is salvageable.

Today we have 4 faulty 4S Li-po batteries on the operation table. Lets see what's wrong with them and how to fix them.
This is the evolution of the script from my other post "Open Applications On Your Computer With Alexa And HA".
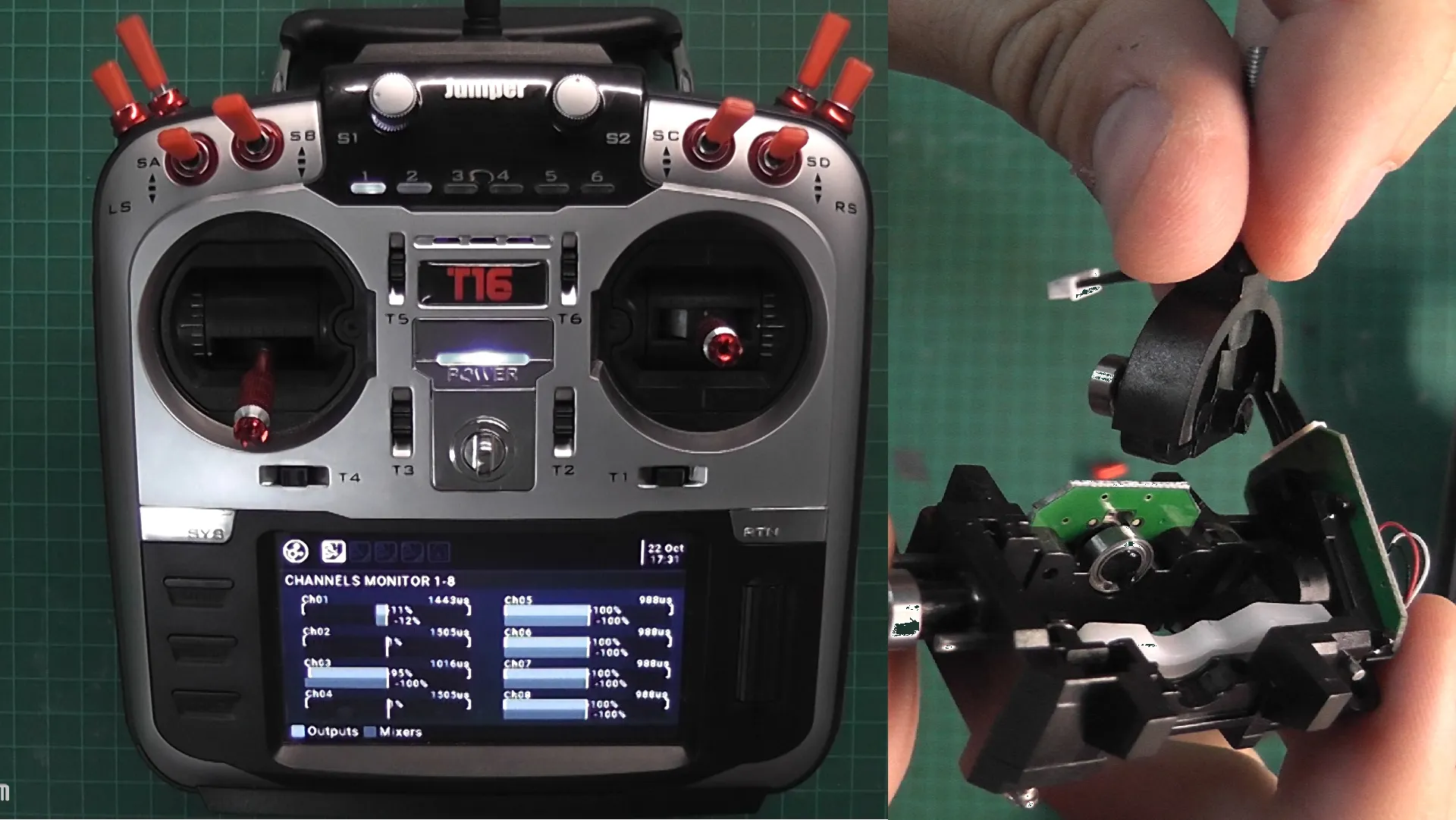
I don't really know how this happened, one day I picked my radio up and noticed the left gimbal isn't centering correctly. I tried trimming it, but it wouldn...

My friend's FPV goggles stopped working in the field. Lets fix them.

The antenna on my drone sticks out a little too much. After a few crashes the insulation on the coax cable as well as some of the shielding got damaged.In th...
![FPV Repair Shop #1 - Crashed Holybro ATLATL-HV VTX Repair [Antenna, Connector, Diode]](/projects/fpv-repair-shop-1/images/20191015_224632-e1571182729160.webp)
A friend of mine crashed his quadcopter pretty hard and broke multiple parts. In this article I'll be looking at his VTX and trying to fix it.
A few friends and I started flying FPV quadcopters.Sometimes, when your VTx frequencies are close to each other you can get your friends feed overpower yours...
I've been making more and more parts of my house remote-controllable over the past few months as part of my home automation process.Controlling things that h...

My girlfriend was sick over the weekend. While she's resting in the bedroom, I'm on-call in the other room.
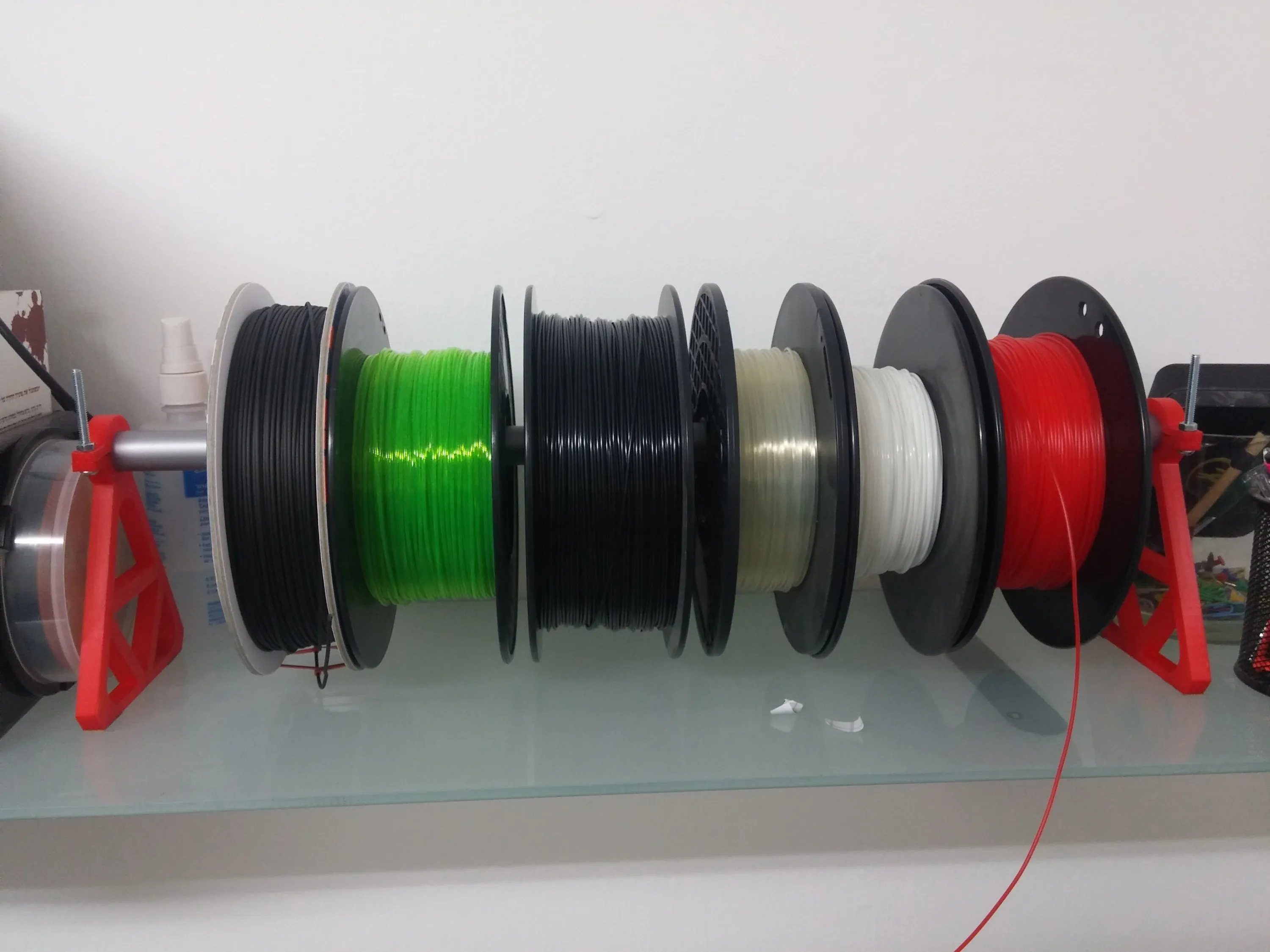
As you can see from the below picture, I hang my filaments above my printers and just pull the one I want.This is fine if the filament is close to being dire...

I had an old Samsung LCD screen that has a small leg with very little adjustment and no other mounting holes or hardware. The problem was that I wanted to us...

The part that holds the shower head in my shower broke a long time ago. let's fix it.

I asked myself the same question. I know of Phantom power for microphones and I know of microphones that require no external power, but apparently there's an...

Ever since I bought the HD650's I've been searching for a microphone solution for gaming.I tried lavalier microphones and desk-standing microphones, but they...
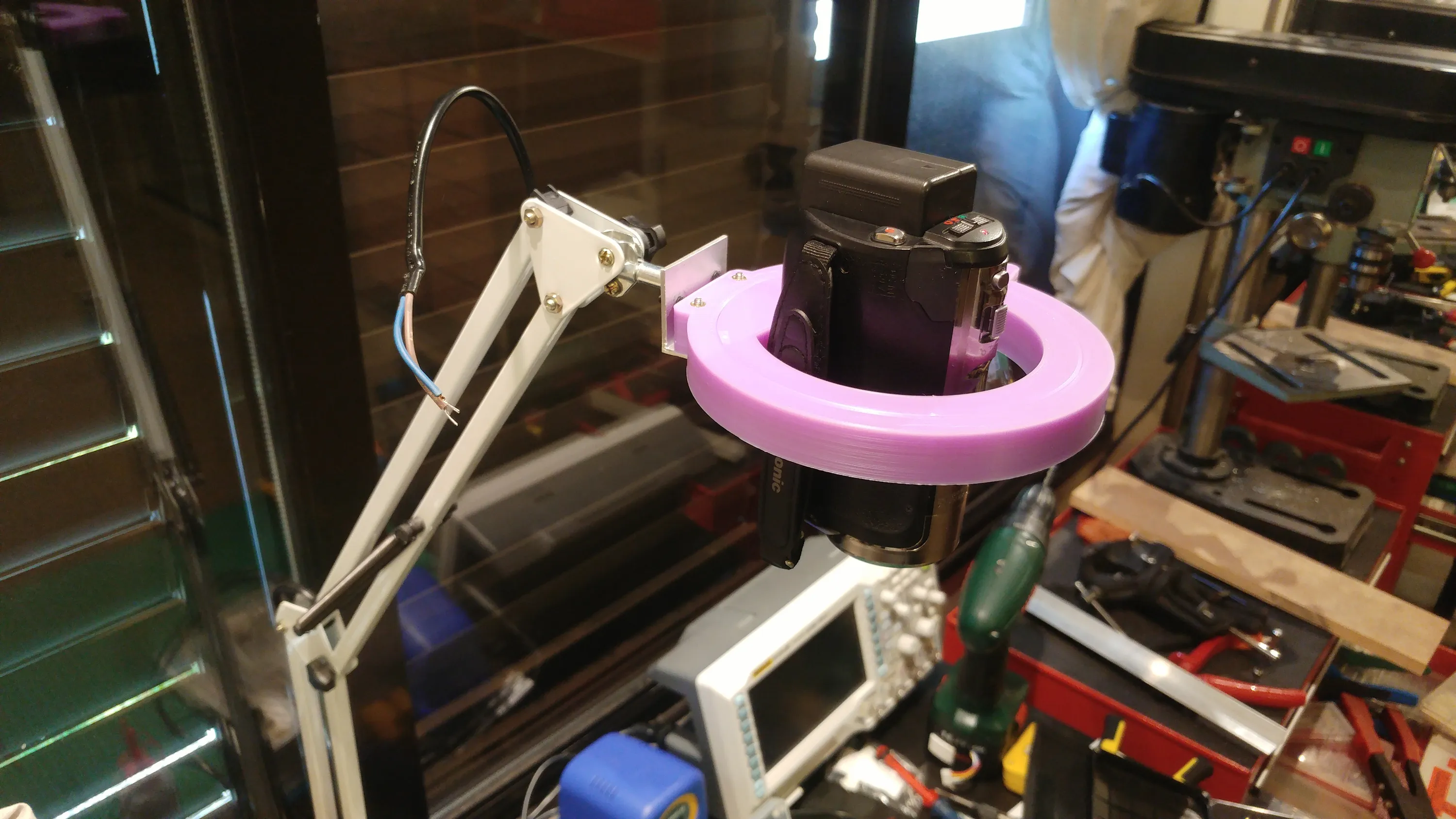
I've been thinking about shooting some time-lapses of projects and I didn't want to have a giant tripod on the desk and have to move it and set it up every t...
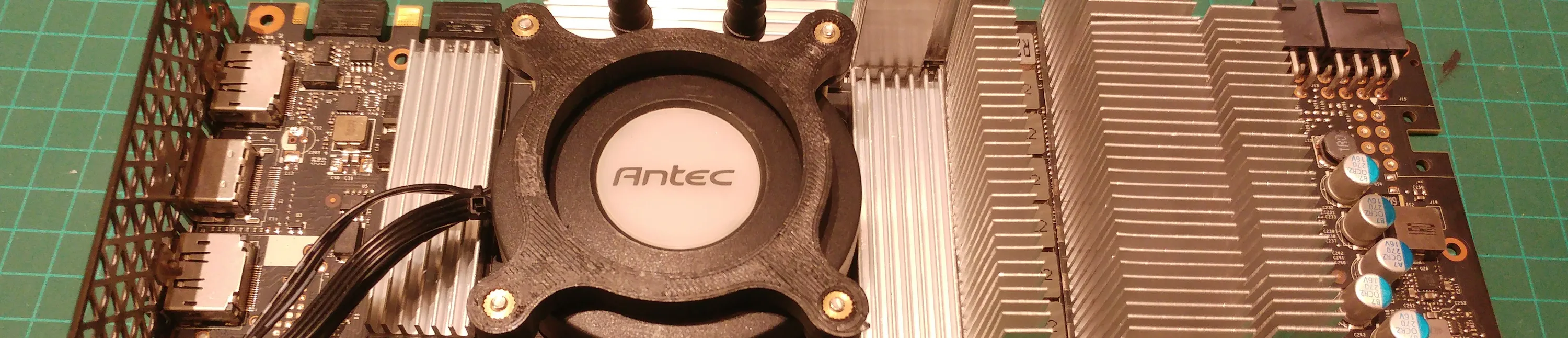
I modded a high-end graphics card and converted it to water cooling





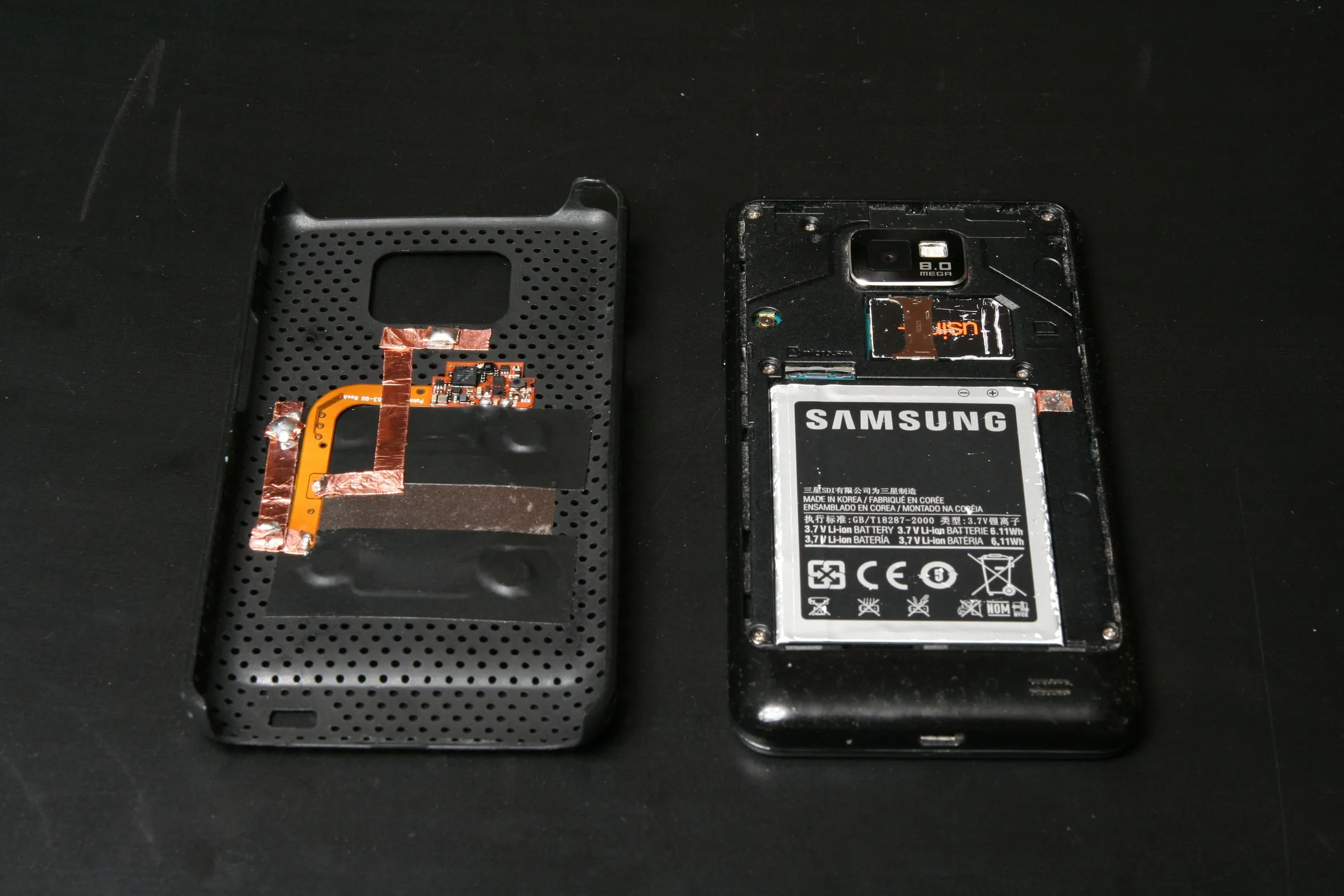
Adding wireless charging to a Samsung Galaxy S II and practically any USB charged device using an induction coil mod.